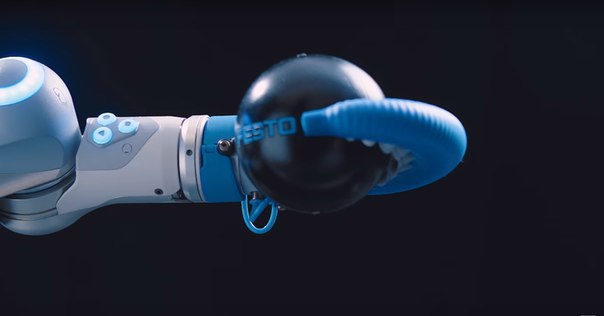
Осьминоги издавна вселяли в моряков суеверный ужас, и данный факт активно использовался современным кинематографом при создании фильмов ужасов. Однако разработчики из компании Festo (Германия) усмотрели в плавных движениях щупальцев и форме конечностей осьминога идеальный прототип для создания безопасного и производительного робота-манипулятора.
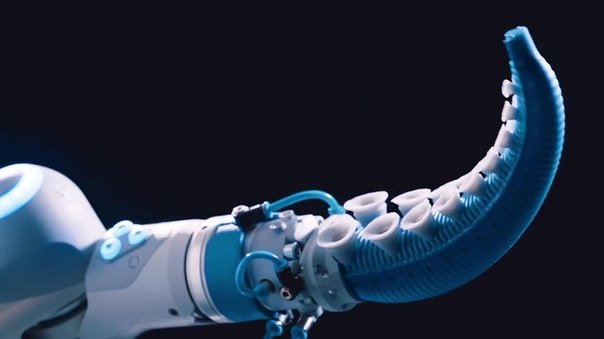
Роботы прочно заняли почётное место в современном производственном процессе, однако, изготовленные из металла манипуляторы несут потенциальную угрозу человеку при неконтролируемом сбое программы или при случайном контакте с конечностями людей. Немецкие инженеры из компании Festo предложили оригинальное решение проблемы, создав новый манипулятор Octopus Gripper (в переводе - захват осьминога). Принцип работы устройства объединяет в себе кинематику — щупальца осьминога и безопасность силиконового материала, из которого он изготавливается. Силиконовый манипулятор заполняется воздухом и оборачивается вокруг рабочего объекта, принимая его геометрическую форму. Захват осуществляется при помощи размещённых в два ряда присосок, часть которых использует принцип вакуумного захвата. Такая конфигурация манипулятора предоставляет возможность работать с объектами сложной геометрической формы и с гладкой, скользкой поверхностью.
Безопасность при работе с Octopus Gripper гарантируется мягкой структурой силиконового манипулятора. Кроме того, существенным плюсом такого робота является отсутствие необходимости в создании специальных клеток безопасности, занимающих большой объем производственных помещений при работе с традиционными роботами. Одновременно гибкая форма захватов обеспечивает универсальность использования Octopus Gripper, который требует минимальной перенастройки при переходе на другие технологические процессы.
-
-
