Разработчики ранее представляли мягкотелых роботов, отличающихся оригинальным внешним видом, подобным оригами, невысокой ценой и простотой конструкции. Единственным недостатком таких механизмов была «слабость» мягких роботов по сравнению с металлическими собратьями. Исследователи Гарвардского университета и Массачусетского технологического института, практикующие в области информатики и ИИ, создали искусственные мышцы, предназначенные для «мягких» роботов.
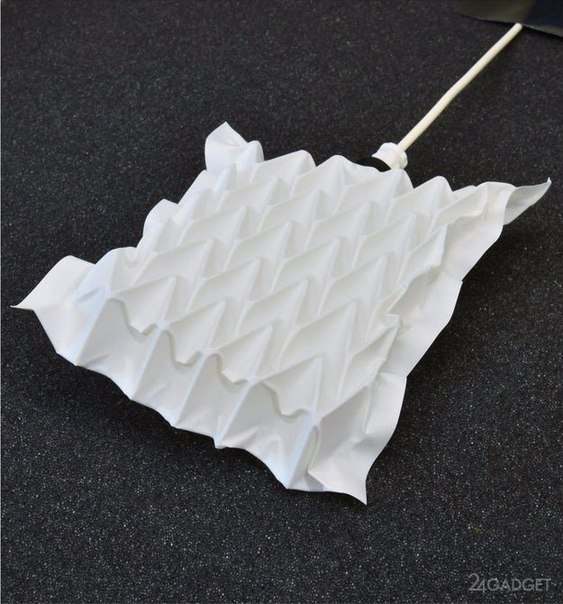
Принцип работы сильных мышц базируется на оригинальной конструкции «скелета и кожи» робота. Основу составляет каркасная конструкция из металла или пластика, окруженная ёмкостями, содержащими газ или жидкость. Вся эта конструкция герметично «запечатана кожей», изготовленной или из пластмассы, или из ткани. Изменение давления в ёмкостях посредством откачивания газа или жидкости создаёт под «кожей» вакуум и заставляет её прилипнуть к скелету, что и способствует напряжению, приводящему элементы робота в движение, сокращающее мышцы. В зависимости от формы и конструкции «скелета» определяется вид движений.
Главной особенностью созданных мышц является их управляемый внешний вид. Не изменяя систему управления, можно получить необходимое движение», - разъяснил разработчик доктор Шугуан Ли.
Технические показатели мышц впечатляют. Роботы смогут поднимать вес в 1000 раз больший своего собственного. Искусственная мышечная структура в 6 раз превосходит эффективность самых совершенных мышц у млекопитающих. Искусственная мускулатура весом 2.6 грамма поднимала предмет массой 3 кг. При изменении линейных размеров мускулатуры эффективность их не изменялась, что и продемонстрировали разработчики, показав экспериментальные объекты величиной в несколько миллиметров и длиной в метр. Цена такого устройства не превышает доллара, а время монтажа на мягком роботе займёт не более 10 минут.
По мнению разработчиков представленная система наиболее безопасна из всех разрабатываемых аналогичных конструкций. Представленное изобретение найдёт применение в области хирургии, создании экзоскелетов для глубоководных манипуляторов и даже для архитектурных изделий, меняющих форму по желанию пользователей.
-

-